
Étude de faisabilité technologique
| Guruge K1, Herath HMKKMB1, Madusanka N2, Park HJ3, Na CS4, Yi M1,2,5, Lee BI1,2,5. Advancing Medical Training with Mixed Reality and Haptic Feedback Simulator for Acupuncture Needling. Sensors (Basel). 2025 Nov 13;25(22):6934. [1] |
2Digital Healthcare Research Center, Pukyong National University, Busan 48513, Republic of Korea.
3College of Korean Medicine, Kyung Hee University, Seoul 02453, Republic of Korea.
4College of Korean Medicine, Dongshin University, Jeonnam 58245, Republic of Korea.
5Division of Smart Healthcare, College of Information Technology and Convergence, Pukyong National University, Busan 48513, Republic of Korea.
L'étude
Contexte
La formation à la puncture en acupuncture repose encore largement sur des approches traditionnelles, associant enseignement théorique, démonstrations et pratique supervisée. Ces modalités offrent un retour peu objectivé, reposant principalement sur l’appréciation du formateur, sans critères standardisés ni mesure quantitative des paramètres du geste
Les dispositifs actuels de réalité étendue (extended reality, XR) appliqués à l’acupuncture se limitent le plus souvent à des fonctions de visualisation ou de repérage des points, sans intégrer de retour haptique — c’est-à-dire, dans l’idéal, la pleine restitution de la sensation perçue par le praticien lors de l’interaction de l’aiguille avec les tissus — ni de dispositifs d’évaluation quantitative des paramètres du geste.
Les technologies de réalité étendue (XR)
La réalité étendue (extended reality, XR) désigne, en pédagogie médicale, l’ensemble des dispositifs numériques permettant de soutenir l’apprentissage des connaissances et des gestes cliniques par la simulation et l’interaction contrôlée. Elle rend possibles des situations d’entraînement reproductibles, indépendantes du contexte de soins réel et ajustées à des objectifs pédagogiques explicitement définis.
Réalité virtuelle (virtual reality, VR) correspond au degré d’immersion le plus élevé. L’utilisateur est entièrement plongé dans un environnement numérique et ne perçoit plus le monde réel. L’espace d’apprentissage est intégralement généré par le système.
Réalité augmentée (augmented reality, AR) conserve le monde réel comme support principal et y superpose des éléments numériques. L’environnement physique demeure visible mais il est enrichi par des repères ou des informations virtuelles. L’interaction avec ces éléments reste limitée.
Réalité mixte (mixed reality, MR) se distingue par l’ancrage spatial des objets virtuels dans l’environnement réel. Ceux-ci demeurent positionnés dans l’espace, réagissent aux mouvements et peuvent être manipulés de manière cohérente avec la gestuelle de l’utilisateur. Le HoloLens 2 utilisé dans le simulateur d’acupuncture relève de cette logique. Il permet l’intégration d’objets virtuels ancrés dans l’espace réel afin de guider et corriger le geste en temps réel.
Appliquée à la formation, la XR favorise l’apprentissage par la répétition contrôlée, l’analyse fine du geste et l’évaluation des compétences selon des critères explicites et standardisés.
Objectifs
Développer et évaluer un simulateur d’entraînement à l’acupuncture basé sur la réalité mixte (MR, mixed reality), associant à l’environnement réel des éléments virtuels ancrés dans cet espace, avec un retour haptique (signal tactile transmis à l'utilisateur), afin d'améliorer l’apprentissage du geste d’insertion de l’aiguille.
Description du système développé
- Le dispositif repose sur un casque HoloLens 2, qui constitue le support matériel de l’expérience, tel qu’illustré dans l’image d’ouverture de l’article. Ce casque place l’utilisateur dans un environnement de réalité mixte structuré autour d’un patient virtuel à taille réelle, spatialement ancré dans l’espace de pratique, et associé à des interfaces d’instructions et de guidage (figure 1A).
- Dans cet environnement, l’utilisateur saisit et manipule une aiguille virtuelle (figure 1B et 1C) et suit les consignes de pratique affichées par le système, ce qui permet de reproduire les conditions gestuelles et cognitives de l’apprentissage du geste d’insertion (figure 1D).
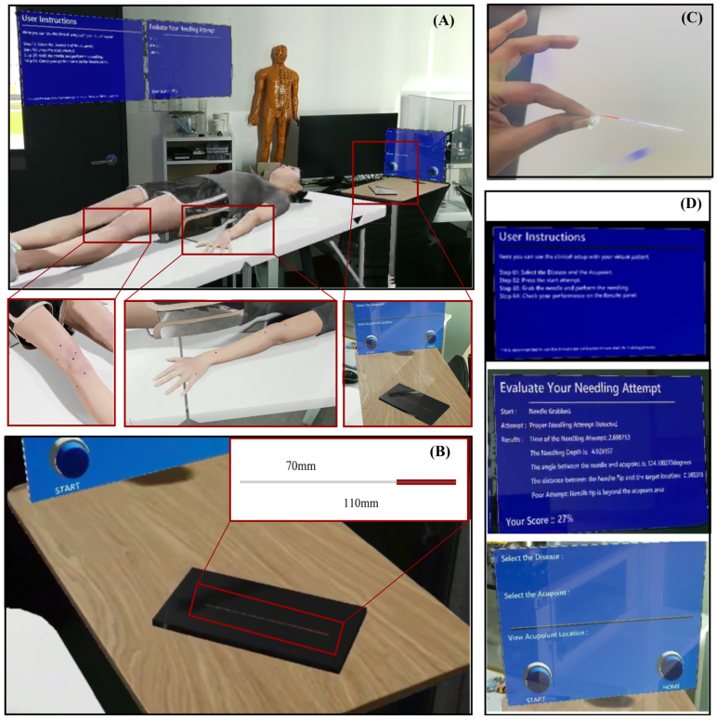
Figure 1. Environnement d’entraînement à l’acupuncture en réalité mixte (Guruge et al., 2025)
(A) Représentation de l’environnement d’entraînement tel qu’il est perçu par l’utilisateur dans le simulateur de réalité mixte. Un patient virtuel à échelle réelle est spatialement ancré sur une table d’examen réelle. Des interfaces holographiques fournissent les instructions, la sélection des paramètres et le retour d’évaluation. Des vues détaillées illustrent l’interaction gestuelle directe avec l’aiguille virtuelle ainsi que l’intégration spatiale cohérente des éléments virtuels dans l’environnement physique. (B) Représentation de l’aiguille virtuelle positionnée sur la table d’examen, prête à être saisie par l’utilisateur. Les dimensions indiquées (longueur totale ≈ 110 mm, zone de préhension ≈ 70 mm) reproduisent l’ergonomie et les proportions d’un instrument réel. (C) Représentation de la saisie et de la manipulation de l’aiguille virtuelle par interaction gestuelle directe, permettant l’insertion dans l’environnement de réalité mixte. (D) Représentation des interfaces holographiques affichant les instructions utilisateur, les paramètres de la tâche et l’évaluation quantitative de la tentative d’insertion (temps, profondeur, angle, précision spatiale, score global).
- Le geste est évalué par rapport à une modélisation volumique interne des acupoints, définie à partir de paramètres fournis par des acupuncteurs expérimentés. Cette modélisation formalise la cible opératoire du geste, en intégrant profondeur, orientation et tolérances, au-delà d’un simple repérage en surface (Figure 2).
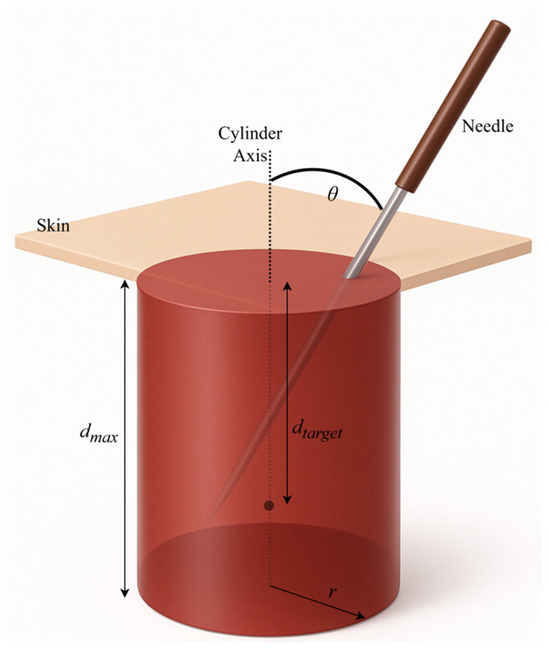
Figure 2. Modélisation volumique interne d’un acupoint (Guruge et al., 2025)
Représentation schématique du volume virtuel associé à un acupoint dans le simulateur de réalité mixte. Le point n’est pas modélisé comme un repère ponctuel en surface mais comme un cylindre interne ancré sous la peau virtuelle. La hauteur du cylindre encode la profondeur cible (dtarget) et la profondeur maximale admissible (dmax), tandis que son axe central définit la trajectoire idéale d’insertion. Le rayon (r) correspond à la tolérance spatiale latérale et l’angle θ représente la déviation angulaire de l’aiguille par rapport à l’axe optimal.
- Enfin, l’exécution est accompagnée d’un retour sensoriel haptique : des vibrations, perçues au niveau de la main, augmentent progressivement à mesure que l’aiguille virtuelle s’enfonce, et un signal distinct avertit l’utilisateur lorsqu’une profondeur excessive est atteinte (figure 3). Ce dispositif complète l’information visuelle et aide à contrôler le geste, sans chercher à imiter la résistance réelle des tissus.
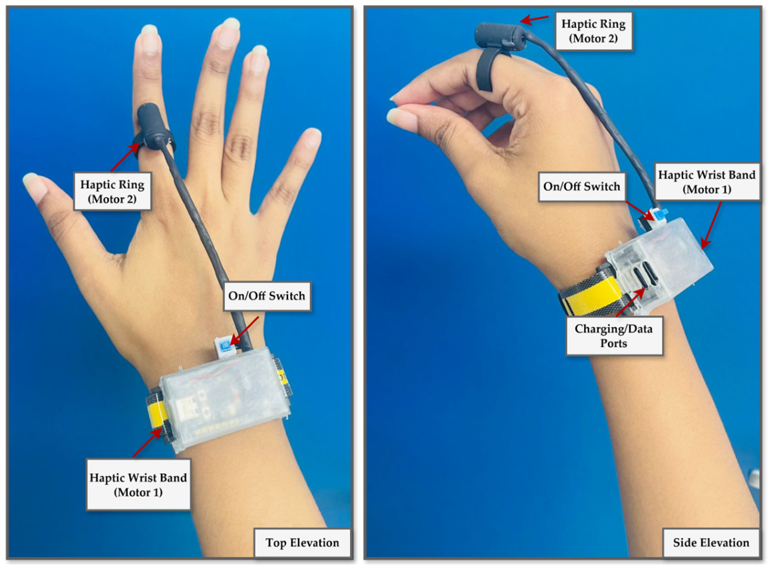
Figure 3. Dispositif haptique portable pour le retour sensoriel en réalité mixte (Guruge et al., 2025)
Représentation du dispositif haptique porté par l’utilisateur dans le simulateur de réalité mixte. Le système est composé d’un anneau haptique positionné sur l’index et d’un module porté au poignet intégrant l’électronique embarquée. Le retour tactile est dépendant de la profondeur d’insertion de l’aiguille virtuelle : l’intensité ou la fréquence des vibrations augmente progressivement avec la progression de l’insertion et un signal spécifique indique le dépassement de la profondeur maximale admissible.
Méthode d’évaluation
- Pour chaque insertion, le système enregistre automatiquement la profondeur atteinte, l’écart angulaire, la distance entre la pointe de l’aiguille et le centre de la cible, ainsi que le temps d’exécution. Ces paramètres, évalués par rapport à la modélisation volumique interne des acupoints définie précédemment, sont agrégés dans un score synthétique, utilisé pour analyser la progression des performances entre les sessions et la capacité du modèle à différencier les niveaux d’expertise.
- Dix participants ont expérimenté le simulateur : huit participants novices en acupuncture mais familiers de la réalité mixte, et deux participants considérés comme experts. Après une phase initiale de familiarisation, ils ont réalisé des insertions sur trois points d’acupuncture (4GI, 11GI et 3TR) au cours de deux sessions distinctes, espacées de vingt-quatre heures. Lors de chaque session, dix insertions consécutives par point étaient effectuées, soit trente insertions par session et soixante insertions par participant sur l’ensemble du protocole.
- Le protocole incluait également un questionnaire final d’utilisabilité, de type USE (Usefulness, Satisfaction, Ease of use : utilité perçue, satisfaction, facilité d’utilisation), combinant des items quantitatifs et des questions ouvertes.
Principaux résultats
- Les courbes d’apprentissage présentées (Figure 4) montrent, chez les participants novices, une évolution des performances d’insertion, marquée par une réduction de la variabilité et une diminution des erreurs de manipulation (dépassements de profondeur et gestes incorrects), avec un rapprochement progressif des plages de tolérance définies par les experts.
- Les scores composites mettent en évidence, comme attendu, des différences globales entre participants novices et experts.
- Enfin, l’évaluation d’utilisabilité indique une appréciation globalement favorable du dispositif par les participants, tant pour la compréhension des consignes que pour la cohérence du retour sensoriel.
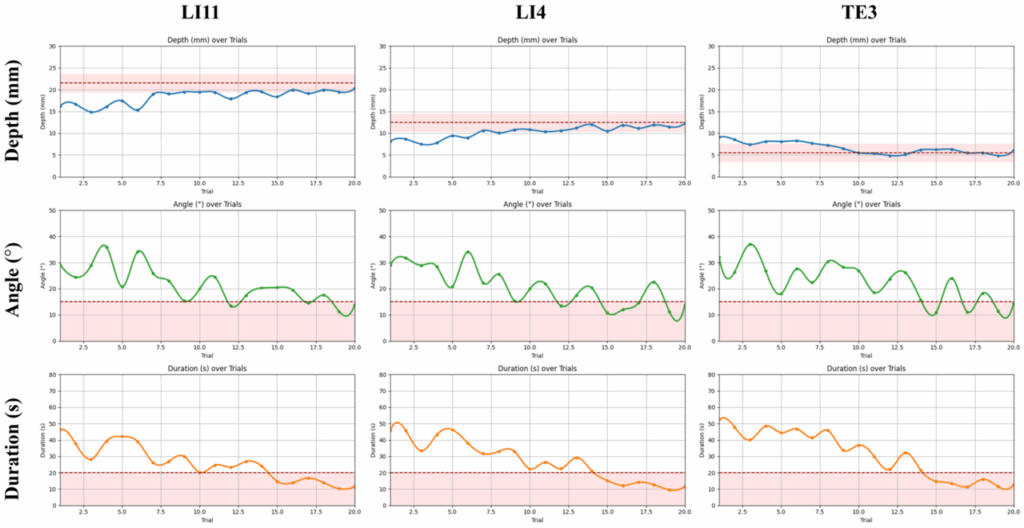
Figure 4. Évolution des paramètres du geste d’insertion au cours de 20 essais consécutifs (Guruge et al., 2025)
Représentation des courbes d’apprentissage du geste d’insertion au cours de 20 essais consécutifs chez des participants novices, pour trois points d’acupuncture (11GI, 4GI et 3TR). Les graphiques montrent l’évolution de la profondeur d’insertion, de l’angle de l’aiguille et de la durée d’exécution en fonction du numéro d’essai. Les zones ombrées correspondent aux plages de tolérance définies par des experts, tandis que les lignes en pointillés indiquent les limites de sécurité utilisées comme référentiel pour l’évaluation du geste.
Conclusion
Ces résultats suggèrent que le dispositif de réalité mixte développé favorise l'apprentissage du geste de la puncture en acupuncture.
Commentaires
L’étude indique qu’un simulateur associant visualisation anatomique, retour haptique et indicateurs objectifs de performance peut améliorer rapidement la précision du geste ainsi que la confiance des utilisateurs. Le réalisme du patient virtuel renforce l’engagement et tend à rapprocher l’entraînement virtuel des conditions cliniques.
Les auteurs relèvent toutefois plusieurs limites : un effectif restreint, une possible familiarité préalable avec la réalité mixte, l’évaluation limitée à trois points d’acupuncture et une durée d’intervention insuffisante pour apprécier la rétention à long terme.
On peut dès lors considérer ce travail comme une étude exploratoire. Il s’agit moins d’apporter une démonstration définitive d’efficacité que de tester la faisabilité technique du dispositif, d’en apprécier l’acceptabilité par les utilisateurs et d’identifier des signaux préliminaires d’amélioration des performances.
La modélisation de la puncture
L’intrusion technologique présente un intérêt immédiat en ce qu’elle conduit à repenser le geste en le soumettant à une analyse structurée. Elle impose sa décomposition en séquences opératoires et en paramètres mesurables tels que l’angle, la profondeur, la trajectoire ou la stabilité (figure 2).
Le retour haptique
Dans cette étude, le retour haptique ne vise pas à reproduire les sensations du praticien lors de l’insertion de l’aiguille ni à simuler les propriétés mécaniques des tissus traversés. Il constitue un simple dispositif de guidage sensoriel dont la fonction est strictement opératoire : traduire la profondeur d’insertion virtuelle en un signal vibratoire continu, proportionnel à l’avancement de l’aiguille. Le dispositif s’inscrit ainsi dans une logique pédagogique de calibration motrice et de prévention de la sur-pénétration plutôt que dans une tentative de restitution phénoménologique du geste de puncture réel. Il ne reproduit pas le geste clinique, mais contribue à en définir implicitement un standard d’exécution.
Les fantômes de point d'acupuncture
À l’inverse, les dispositifs de type fantôme biomécanique s’inscrivent dans une autre logique (encadré). Ils visent à reproduire, au moins partiellement, les propriétés mécaniques du tissu vivant et à restituer un retour haptique issu de l’interaction physique réelle entre l’aiguille et le matériau. Le signal perçu n’est plus une traduction artificielle d’un paramètre numérique, mais le produit direct d’une résistance matérielle réelle. Ces dispositifs constituent ainsi une étape importante dans l’objectivation du geste, en articulant simulation, mesure et expérience sensorielle.
Le fantôme présente un intérêt pédagogique majeur. Connecté à un système numérique de capture, d’enregistrement et d’analyse des gestes, il permet l’apprentissage des manipulations d’aiguille avec un retour haptique comparable à celui du tissu humain, tout en offrant la visualisation et la comparaison objective des gestes sans recours à un patient. Le praticien peut ainsi ajuster amplitude, fréquence et régularité à partir de données mesurées, transformant un savoir-faire incorporé en une compétence analysable et reproductible.
En biomédecine, un fantôme désigne un modèle matériel destiné à reproduire certaines propriétés physiques de tissus humains, utilisé à des fins de calibration et d’entraînement.
En acupuncture, l’enjeu est de disposer d’un support capable d’opposer à l’aiguille une résistance comparable à celle du tissu vivant, garantissant un retour haptique réaliste et constituant une référence stable et pertinente pour l’apprentissage et l’analyse du geste.
En 2014, une équipe coréenne a élaboré un fantôme à partir d’un gel d’agarose dont la concentration optimale a été définie expérimentalement. Des concentrations comprises entre 1 % et 7 % ont été testées. L’étape initiale a consisté à mesurer in vivo la résistance mécanique opposée à l’aiguille lors d’une rotation standardisée sur plusieurs points humains. L’amplitude, la fréquence et la profondeur d’insertion ont été strictement contrôlées à l’aide de capteurs reliés à un système informatisé d’enregistrement et d’analyse des données, permettant la visualisation en temps réel des paramètres du geste.
La force de rotation ainsi enregistrée, mesurée sous forme de couple (figure 6), a constitué la référence pour ajuster progressivement la concentration du gel jusqu’à reproduire une réponse mécanique comparable. Les concentrations intermédiaires, notamment entre 4 % et 6 %, produisaient des valeurs proches de celles observées chez l’humain.
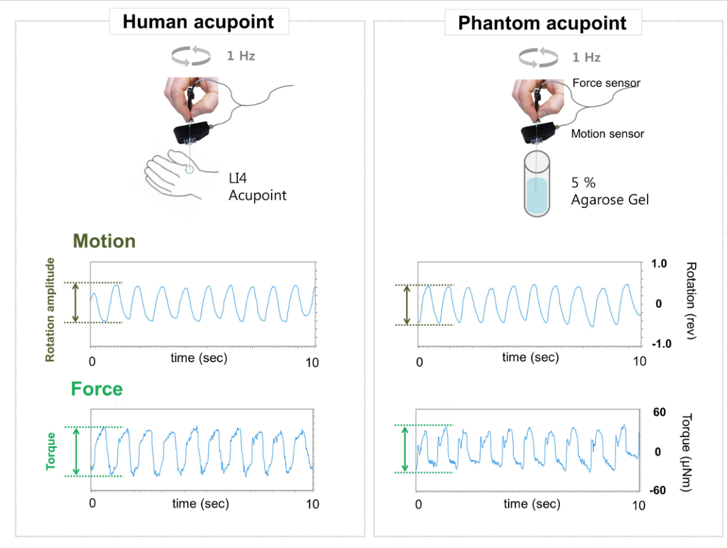
La figure illustre la proximité des profils dynamiques obtenus dans les deux conditions expérimentales. Elle montre que le geste peut être décrit en termes de paramètres mesurables — amplitude, fréquence et couple — indépendamment de toute référence interprétative, ce qui autorise sa modélisation et sa reproduction contrôlée.
La validation du modèle a reposé sur un test en aveugle auprès de praticiens expérimentés. Ceux-ci ont manipulé alternativement un point humain et le fantôme sans connaître leur nature. L’absence de différence significative dans la sensation de prise de l’aiguille et l’incapacité à distinguer le modèle du point réel ont confirmé la crédibilité du dispositif (Lee IS et al., 2014).
Ce type de dispositif ouvre également des perspectives pédagogiques. Un système dédié à l’apprentissage des manipulations d’aiguille a ainsi été développé, associant fantôme en gel, capteurs de mouvement et visualisation en temps réel du geste (Lee YS et al., 2016). L’apprenant peut comparer son mouvement à un modèle de référence et en ajuster les paramètres, ce qui permet une amélioration mesurable des performances au cours de l’entraînement. Le geste devient ainsi un objet d’apprentissage guidé, fondé sur le retour sensoriel et la quantification des écarts.
Des développements récents ont introduit des fantômes polymériques plus stables, notamment à base de PDMS, permettant un réglage plus fin des propriétés mécaniques et une reproduction plus précise des interactions aiguille-tissu (Lee Y et al., 2024).
L'essentiel à retenir
La réalité virtuelle et la réalité mixte introduisent en médecine, et en acupuncture, des environnements d’apprentissage standardisés permettant la simulation d'un geste et son évaluation.
L’intrusion technologique conduit à une modélisation du geste de puncture par sa décomposition en paramètres mesurables, avec comparaison à des références expertes.
Les fantômes biomécaniques reproduisent une interaction mécanique aiguille-tissu et permettent un retour haptique approprié. Couplés à un dispositif d’enregistrement et d’analyse, ils autorisent la visualisation, la comparaison et l’ajustement des paramètres de la puncture et des manipulations de l’aiguille.
Dr Johan Nguyen
Références
- Guruge K, Herath HMKKMB, Madusanka N, Park HJ, Na CS, Yi M, Lee BI. Advancing Medical Training with Mixed Reality and Haptic Feedback Simulator for Acupuncture Needling. Sensors (Basel). 2025 Nov 13;25(22):6934. https://doi.org/10.3390/s25226934 🔓
Mots-clés : Techniques thérapeutiques
