
Étude expérimentale en ingénierie biomédicale
| Ling HE1, Hui Y1, Kang LI2, Junwen W2, Zhibo S3, Jinsheng Y4, Jing Z1. Research on acupuncture robots based on the OptiTrack motion capture system and a robotic arm. J Tradit Chin Med. 2025 Feb;45(1):201-212. [1]. |
2West China Biomedical Big Data Center, Sichuan University, Chengdu 610065, China.
3Institute of Basic Theory for Chinese Medicine, Beijing 100700, China.
4Institute of Basic Theory for Chinese Medicine, China Academy of Chinese Medical Sciences, Beijing 100700, China.
L'étude
Objectif
L’objectif de l’étude est de tester un système robotisé autonome capable d’opérer un ensemble de techniques d’acupuncture.
Méthodologie
Le système robotique est composé de trois modules clés :
1- Positionnement automatique de l’aiguille au niveau du point
- Le médecin marque préalablement les points à utiliser avec un feutre vert.
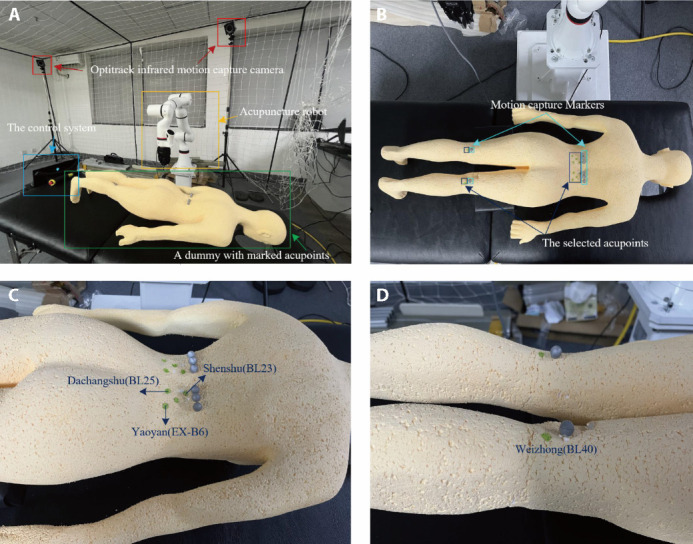
- Pour permettre leur détection optique des marqueurs réfléchissants sont placés à proximité. Ces marqueurs, conçus pour réfléchir la lumière infrarouge, sont captés par le système de capture de mouvement OptiTrack et ses 7 caméras infrarouges (figure 1).
- Ils ne sont pas placés directement sur les points d’acupuncture afin de laisser l’espace nécessaire à l’insertion des aiguilles. Une correction de position est donc appliquée pour aligner les coordonnées relevées avec les emplacements réels définis par le médecin.
- Une fois ces ajustements effectués, le bras robotique peut intervenir avec précision.
2- Puncture et manipulations d'aiguille
- Un bras robotique collaboratif (ROKAE xMate ER3 Pro) avec 7 degrés de liberté et des capteurs de couple permet un contrôle précis et l’évitement d’obstacles.
- Une pince intelligente (BY-E140) simule la main de l’acupuncteur pour saisir et insérer les aiguilles.
- Les techniques d'enfoncement-retrait et de rotation en va-et-vient sont exécutées automatiquement.
- Une double rétroaction combinant la position actuelle et un suivi visuel ajuste en temps réel la trajectoire de l’aiguille afin de compenser d’éventuels mouvements du patient.

3- Détection du deqi
- L’expression verbale du patient est analysée en temps réel à l’aide d’un microphone TAKSTAR PC-K500 et d’une carte son Yamaha UR12.
- Le système repose sur un réseau de neurones convolutifs profonds (DCNN) avec la fonction de perte CTC qui interprète les mots clés formulés par le patient pour exprimer la sensation de deqi : « tong » (douleur), « suan » (endolorissement), « zhang » (distension) et « ma » (engourdissement).
Les tests expérimentaux ont été réalisés sur un mannequin anatomique standardisé afin d’évaluer la précision du robot dans des conditions contrôlées avant toute application clinique. Quatre points d’acupuncture associés aux traitements de la lombalgie ont été sélectionnés : 23V, 25V, yaoyan et 40V (figure 1).
Résultats
Les résultats obtenus à l’issue des différentes expérimentations menées montrent une grande précision du système robotique :
- Précision de la position de l'aiguille :
- Erreur de positionnement inférieure à 3,3 mm, conforme aux marges autorisées pour l’insertion des aiguilles.
- Précision des manipulations d'aiguille :
- Déviation moyenne de 0,02 mm.
- Angle de déviation inférieur à 0,15°.
- Profondeur d’insertion avec une erreur moyenne de 2 mm.
- Précision de la détection du deqi
- Précision moyenne de détection de 94,52 %, y compris en tenant compte des variations dialectales chinoises.
- Précision individuelle des mots clés : entre 97,01 % et 98,07 %.
- Comparaison des coordonnées des points localisés par le robot avec celles définies par un praticien : aucune différence significative (p > 0,05).
Conclusion
Le système robotisé exécute avec précision et reproductibilité certaines séquences techniques spécifiques de l’acupuncture. En standardisant ces gestes, il réduit la variabilité liée à l’opérateur. Son intégration en clinique pourrait contribuer à une meilleure évaluation quantitative des effets de ces manipulations.
Commentaires
Une précédente étude menée par Lan et Litscher (2019 [2]) avait déjà exploré, sous un angle plus théorique, la question d’un système robotisé appliqué à l’acupuncture, en abordant les trois mêmes problématiques : la localisation automatique des points, la manipulation des aiguilles par un bras robotisé et la détection de la sensation de deqi. Leur approche diffère cependant de celle analysée ici.
Dans cette dernière, il ne s’agit pas d’une localisation automatique des points, mais d’un positionnement automatique de l’aiguille sur un point préalablement marqué. Lan et Litscher proposaient quant à eux une localisation des points reposant sur l’intelligence artificielle, combinant vision par ordinateur, modélisation 3D et algorithmes de transformation d’image. L’application de l’IA à ce domaine est en plein développement [3, 4]. À terme, ces deux approches devraient converger pour aboutir à un système intégrant à la fois détection des points et positionnement automatisé des aiguilles.
Concernant la détection de la sensation de deqi l’étude adopte une approche basée sur la reconnaissance vocale où le robot analyse les réponses verbales du patient. Lan et Litscher, en revanche, proposaient une approche basée sur l’analyse du signal électroencéphalographique (EEG), considérant les modifications de l’activité cérébrale comme un marqueur objectif du deqi.
La robotisation
Sur le plan expérimental et clinique elle permet de standardiser, quantifier et reproduire avec précision les différentes manipulations des aiguilles, garantissant une exécution rigoureuse et reproductible des gestes techniques. Ainsi, elle offre la possibilité d’analyser l’influence des différents paramètres - fréquence, l’amplitude, la vitesse - sur les réponses biologiques et thérapeutiques [5]. Cette approche contribue à l’optimisation des protocoles sur des bases objectives et mesurables.
Sur le plan conceptuel et réflexif, elle constitue un outil d’exploration des différents temps de l’acte d’acupuncture. Elle amène le praticien à s’interroger sur la localisation des points, les modalités de manipulation des aiguilles et la définition même du deqi. En décomposant le geste en différents temps, chacun correspondant à une problématique spécifique, elle nourrit la réflexion, l’analyse et l’évolution des pratiques.
Dynamique de recherche en acupuncture
L’acupuncture apparaît aujourd’hui comme une discipline en pleine dynamique scientifique, où les avancées technologiques et conceptuelles sont mobilisées pour approfondir sa compréhension et optimiser ses applications cliniques. Cette transformation n’est pas une adaptation contrainte à des cadres extérieurs, mais une dynamique endogène, portée par une communauté scientifique qui renouvelle et interroge ses propres fondements théoriques et expérimentaux.
L’intégration des outils modernes – neuroimagerie fonctionnelle, approches omiques, robotisation, intelligence artificielle – illustre cette vitalité. Ces technologies ne se limitent pas à une validation externe mais participent à un processus structurant d’analyse et d’objectivation des pratiques répondant aux exigences et standards de la médecine fondée sur les preuves.
Cette évolution éloigne l'acupuncture des représentations culturalistes, exotiques et figées souvent projetées sur elle. Elle l’impose au contraire comme un objet d’étude structuré et évolutif, pleinement adapté aux enjeux méthodologiques actuels.
Dr Johan Nguyen
Références
- Ling HE, Hui Y, Kang LI, Junwen W, Zhibo S, Jinsheng Y, Jing Z. Research on acupuncture robots based on the OptiTrack motion capture system and a robotic arm. J Tradit Chin Med. 2025 Feb;45(1):201-212. https://pmc.ncbi.nlm.nih.gov/articles/PMC11764947/🔓
- Lan KC, Litscher G. Robot-Controlled Acupuncture-An Innovative Step towards Modernization of the Ancient Traditional Medical Treatment Method. Medicines (Basel). 2019 Aug 10;6(3):87. https://doi.org/10.3390/medicines6030087 🔓
- Nguyen J. Localisation des points du dos par intelligence artificielle. Acupuncture Preuves & Pratiques. Avril 2024. https://gera.fr/localisation-des-points-du-dos-par-intelligence-artificielle/ 🔓
- Malekroodi HS, Seo SD, Choi J, Na CS, Lee BI, Yi M. Real-time location of acupuncture points based on anatomical landmarks and pose estimation models. Front Neurorobot. 2024 Nov 8;18:1484038. https://doi.org/10.3389/fnbot.2024.1484038🔓
- Nguyen J. Quels paramètres pour une manipulation de l’aiguille par enfoncement-retrait à visée antalgique ? Acupuncture Preuves & Pratiques. Février 2025. https://gera.fr/quels-parametres-pour-une-manipulation-de-laiguille-par-enfoncement-retrait-a-visee-antalgique/🔓
Mots-clés : Intelligence artificielle - Techniques thérapeutiques
